Processing Estimation Results#
This section shows how to obtain and process estimation results.
[1]:
# only necessary if you run this in a jupyter notebook
%matplotlib inline
import matplotlib.pyplot as plt
# import the base class:
from pydsge import *
# import all the useful stuff from grgrlib:
from grgrlib import *
Loading and printing stats#
The meta data on estimation results is stored in the numpy-fileformat *.npz and is by default suffixed by the tag _meta. An example is included with the package. Lets load it…
[2]:
print(meta_data)
mod = DSGE.load(meta_data)
/home/gboehl/github/pydsge/pydsge/examples/dfi_doc0_meta.npz
Note that, again, meta_data is the path to the file.
As before, the mod object now collects all information and methods for the estimated model. That means you can do all the stuff that you could to before, like running irfs or the filter. It also stores some info on the estimation:
[3]:
info = mod.info()
Title: dfi_doc0
Date: 2022-10-26 18:33:45.991271
Description: dfi, crisis sample
Parameters: 11
Chains: 40
Last 100 of 400 samples
The mod object provides access to the estimation stats:
[4]:
summary = mod.mcmc_summary()
distribution pst_mean sd/df mean sd mode hpd_5 hpd_95 \
theta beta 0.500 0.100 0.816 0.028 0.826 0.763 0.857
sigma normal 1.500 0.375 2.359 0.294 2.294 1.904 2.816
phi_pi normal 1.500 0.250 2.168 0.169 2.100 1.945 2.468
phi_y normal 0.125 0.050 0.114 0.019 0.106 0.077 0.142
rho_u beta 0.500 0.200 0.956 0.009 0.962 0.941 0.967
rho_r beta 0.500 0.200 0.502 0.084 0.459 0.355 0.641
rho_z beta 0.500 0.200 0.996 0.003 0.997 0.993 1.000
rho beta 0.750 0.100 0.825 0.026 0.817 0.787 0.869
sig_u inv_gamma_dynare 0.100 2.000 0.155 0.025 0.140 0.122 0.197
sig_r inv_gamma_dynare 0.100 2.000 0.099 0.012 0.107 0.078 0.115
sig_z inv_gamma_dynare 0.100 2.000 0.091 0.028 0.082 0.045 0.129
error
theta 0.002
sigma 0.016
phi_pi 0.010
phi_y 0.001
rho_u 0.001
rho_r 0.006
rho_z 0.000
rho 0.002
sig_u 0.002
sig_r 0.001
sig_z 0.002
Mean acceptance fraction: 0.169
The summary is a pandas.DataFrame object, so you can do fancy things with it like summary.to_latex(). Give it a try.
Posterior sampling#
One major interest is of course to be able to sample from the posterior. Get a sample of 100 draws:
[5]:
pars = mod.get_par('posterior', nsamples=100, full=True)
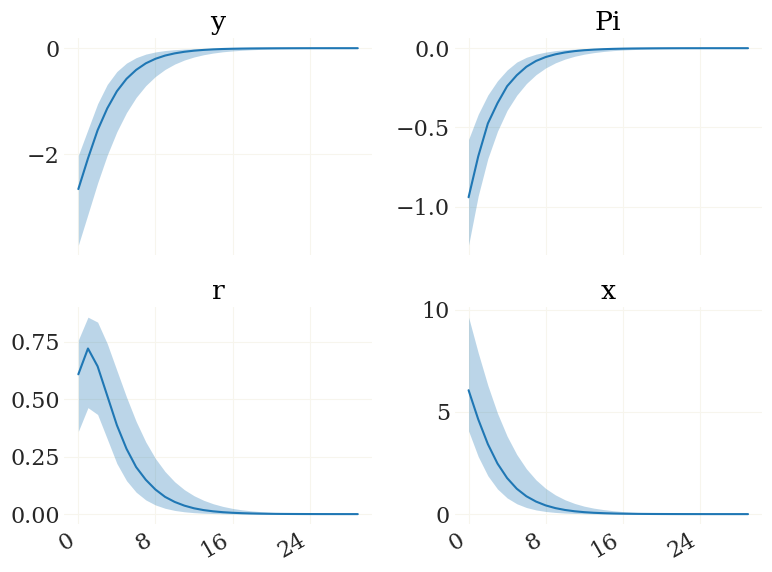
Now, essentially everything is quite similar than before, when we sampled from the prior distribution. Let us run a batch of impulse response functions with these
[6]:
ir0 = mod.irfs(('e_r',1,0), pars)
# plot them:
v = ['y','Pi','r','x']
fig, ax, _ = pplot(ir0[0][...,mod.vix(v)], labels=v)
Note that you can also alter the parameters from the posterior. Lets assume you want to see what would happen if sigma is always one. Then you could create a parameter set like:
[7]:
pars_sig1 = [mod.set_par('sigma',1,p) for p in pars]
This is in particular interesting if you e.g. want to study the effects of structural monetary policy. We can also extract the smoothened shocks to do some more interesting exercises. But before that, we have to load the filter used during the estimation:
[8]:
# load filter:
mod.load_estim()
# extract shocks:
epsd = mod.extract(pars, nsamples=1, bound_sigma=4)
[estimation:] Model operational. 12 states, 3 observables, 3 shocks, 81 data points.
Adding parameters to the prior distribution...
- theta as beta (0.5, 0.1). Init @ 0.7813, with bounds (0.2, 0.95)
- sigma as normal (1.5, 0.375). Init @ 1.2312, with bounds (0.25, 3)
- phi_pi as normal (1.5, 0.25). Init @ 1.7985, with bounds (1.0, 3)
- phi_y as normal (0.125, 0.05). Init @ 0.0893, with bounds (0.001, 0.5)
- rho_u as beta (0.5, 0.2). Init @ 0.7, with bounds (0.01, 0.9999)
- rho_r as beta (0.5, 0.2). Init @ 0.7, with bounds (0.01, 0.9999)
- rho_z as beta (0.5, 0.2). Init @ 0.7, with bounds (0.01, 0.9999)
- rho as beta (0.75, 0.1). Init @ 0.8, with bounds (0.5, 0.975)
- sig_u as inv_gamma_dynare (0.1, 2). Init @ 0.5, with bounds (0.025, 5)
- sig_r as inv_gamma_dynare (0.1, 2). Init @ 0.5, with bounds (0.01, 3)
- sig_z as inv_gamma_dynare (0.1, 2). Init @ 0.5, with bounds (0.01, 3)
[estimation:] 11 priors detected. Adding parameters to the prior distribution.
[extract:] Extraction requires filter in non-reduced form. Recreating filter instance.
100%|██████████| 100/100 [00:24<00:00, 4.05 sample(s)/s]
epsd is a dictionary containing the smoothed means, smoothened observables, the respective shocks and the parameters used for that, as explained in the previous section. Now that we have the shocks, we can again do a historical decomposition or run counterfactual experiments. The bound_sigma parameter adjusts the range in which the CMAES algoritm searches for a the set of shocks to fit the time series (in terms of shock standard deviations). A good model combined with a data set without
strong irregularities (such as financial crises) should not need a high bound_sigma. The default value is to search within 4 shock standard deviations.